- 聯(lián)系人:劉正磊(銷售經(jīng)理)
- 業(yè)務(wù)手機(jī):13969324170
- 辦公電話:0533-2084699
- 傳真號(hào)碼:0533-2081004
- 公司地址:山東省淄博市張店區(qū)灃水鎮(zhèn)
半輪型柔性鉸鏈的結(jié)構(gòu)設(shè)計(jì)和分析
摘 要:柔性鉸鏈由于具有無間隙、無摩擦和易于一體化設(shè)計(jì)等諸多優(yōu)點(diǎn),而被廣泛應(yīng)用于精密操作、機(jī)器人、微納定位等需要超精密高速運(yùn)動(dòng)的領(lǐng)域。面向高速高加速度雙側(cè)驅(qū)動(dòng)系統(tǒng),針對(duì)運(yùn)動(dòng)系統(tǒng)的整體高剛度和局部相對(duì)低剛度特性,設(shè)計(jì)了一種具有平動(dòng)高剛度和扭轉(zhuǎn)低剛度的半輪型柔性鉸鏈。基于旋量變換理論,以半輪型柔性鉸鏈中柔性單元的尺寸和位置角度作為設(shè)計(jì)幾何參數(shù),推導(dǎo)了鉸鏈的六自由度剛度矩陣模型,并綜合分析了各項(xiàng)設(shè)計(jì)幾何參數(shù)對(duì)鉸鏈的各向剛度、相對(duì)剛度以及轉(zhuǎn)動(dòng)誤差的影響,并以整體平動(dòng)高剛度和扭轉(zhuǎn)低剛度為設(shè)計(jì)約束條件,討論鉸鏈結(jié)構(gòu)參數(shù)的選取。結(jié)果表明:該設(shè)計(jì)方法更為簡(jiǎn)潔、快捷,從而為柔性鉸鏈的設(shè)計(jì)和應(yīng)用提供一定的依據(jù)。
0 引言
高速高加速度雙側(cè)驅(qū)動(dòng)系統(tǒng)在直線運(yùn)動(dòng)方向上具有高剛度,以保證高動(dòng)態(tài)特性下的高控制帶寬。同時(shí),在扭轉(zhuǎn)方向上必須具有相對(duì)低剛度,以防止雙側(cè)驅(qū)動(dòng)力不一致造成同步誤差或扭轉(zhuǎn)而影響運(yùn)動(dòng)系統(tǒng)的穩(wěn)定性。柔性鉸鏈通常僅由一個(gè)部件構(gòu)成,按特殊需求對(duì)零件形狀進(jìn)行設(shè)計(jì),使零件的某些特定區(qū)域特別薄弱,而在一些運(yùn)動(dòng)自由度上應(yīng)力應(yīng)變集中。再通過自身的柔性變形,來傳遞輸入端驅(qū)動(dòng)力和位移,從而獲得在固定坐標(biāo)系下的運(yùn)動(dòng)位移關(guān)系。正是由于這樣的特性,使得柔性鉸鏈適合應(yīng)用于高速運(yùn)動(dòng)系統(tǒng)中。
國內(nèi)外很多學(xué)者已對(duì)柔性鉸鏈作了大量研究,并取得了一定的成果。Smith等設(shè)計(jì)了橢圓型柔性鉸鏈,推導(dǎo)出橢圓型柔性鉸鏈柔度封閉方程,并利用有限元法和實(shí)驗(yàn)加以驗(yàn)證。Lobontiu等對(duì)各類缺口類型(包括角圓型、直圓型、橢圓型、拋物線型、雙曲線型、雙軸型、三段式、徑向?qū)ΨQ型)做了廣泛研究,建立了各種鉸鏈的閉環(huán)柔度方程,并分析了其精度和應(yīng)力等性能。Schot?borgh等[6]根據(jù)有限元仿真分析結(jié)果,并采用數(shù)值擬合法求得直圓型、直梁型和交叉型柔性鉸鏈的剛度及應(yīng)力的無量綱設(shè)計(jì)圖,從而幫助設(shè)計(jì)者在最初設(shè)計(jì)階段選擇柔性鉸鏈的類型和設(shè)計(jì)幾何參數(shù)。沈意平等[7]基于力插值的有限元法,建立了圓弧柔性鉸鏈的有限元分析模型,并推導(dǎo)出其一致質(zhì)量矩陣表達(dá)式。劉浪等[8]通過增加交叉簧片型柔性鉸鏈中的簧片數(shù)量,設(shè)計(jì)了一種一般化具有大運(yùn)動(dòng)行程的柔性鉸鏈。
本文針對(duì)上述問題提出了一種應(yīng)用于雙側(cè)驅(qū)動(dòng)系統(tǒng)的半輪型柔性鉸鏈設(shè)計(jì)方法。并基于旋量變換理論,建立了單個(gè)柔性鉸鏈和組合鉸鏈的剛度矩陣模型,以整體平動(dòng)高剛度和扭轉(zhuǎn)低剛度為設(shè)計(jì)約束條件,綜合分析了各項(xiàng)設(shè)計(jì)幾何參數(shù)對(duì)鉸鏈的各向剛度、相對(duì)剛度以及轉(zhuǎn)動(dòng)誤差3個(gè)性能指標(biāo)的影響。通過有限元仿真分析,驗(yàn)證模型的有效性。
1 半輪型柔性鉸鏈設(shè)計(jì)
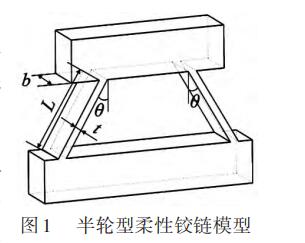
為了滿足雙側(cè)驅(qū)動(dòng)系統(tǒng)自由度的剛度需求,本文采用一種半輪型柔性鉸鏈如圖1所示,可實(shí)現(xiàn)系統(tǒng)在X、Y自由度具有高剛度以及Rz自由度具有相對(duì)較低剛度。其中,L為梁的長(zhǎng)度,b為梁的寬度,t為梁的厚度,θ為兩側(cè)子柔性單元與整個(gè)鉸鏈端面法線間夾角。該半輪型柔性鉸鏈兩側(cè)對(duì)稱設(shè)有兩個(gè)均勻直梁型子柔性單元結(jié)構(gòu),實(shí)現(xiàn)吸收運(yùn)動(dòng)件在Rz自由度上產(chǎn)生的順時(shí)針或逆時(shí)針方向的扭轉(zhuǎn)。
2 鉸鏈剛度矩陣模型的建立
半輪型柔性鉸鏈上設(shè)有橫截面積為矩形的均勻直梁型柔性單元,使其一端固定,在自由端建立如圖2所示坐標(biāo)系。
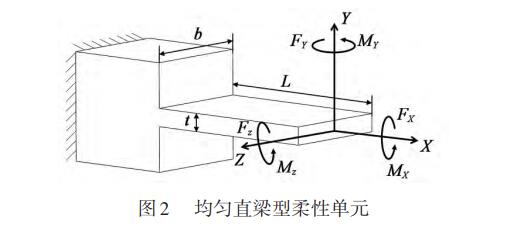
柔性鉸鏈在自由端上承受力旋量F=[FX,FY,FZ,MX,MY,MZ]T,對(duì)應(yīng)方向產(chǎn)生的微小形變旋量為ζ=[δX,δY,δZ,θX,θY,θZ]T,其中{FX,FY,FZ}T為沿對(duì)應(yīng)坐標(biāo)軸的力,{MX,MY,MZ}T為繞對(duì)應(yīng)坐標(biāo)軸的力矩,{δX,δY,δZ}T為沿對(duì)應(yīng)坐標(biāo)軸的伸縮形變量,{θX,θY,θZ}T為繞對(duì)應(yīng)坐標(biāo)軸的扭轉(zhuǎn)和彎曲角度。
根據(jù)胡克定理,F(xiàn)=Kζ,梁的六自由度剛度矩陣可表示為:
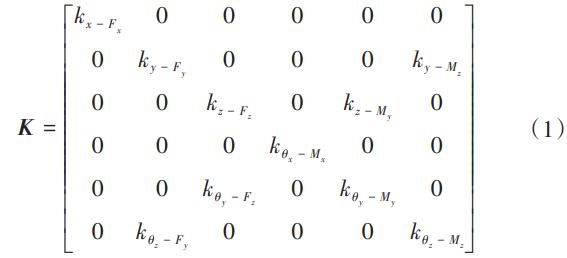
根據(jù)Timoshenko梁理論模型,剛度矩陣K中元素方程可表示為:
式中:E為楊氏模量;G為剪切模量;k1為剪切修正系數(shù),對(duì)于矩形截面k1=6/5;k2為矩形截面自由扭轉(zhuǎn)時(shí)的抗扭截面系數(shù)的因數(shù),其取值為“橫截面長(zhǎng)/寬”相關(guān)的因數(shù)。
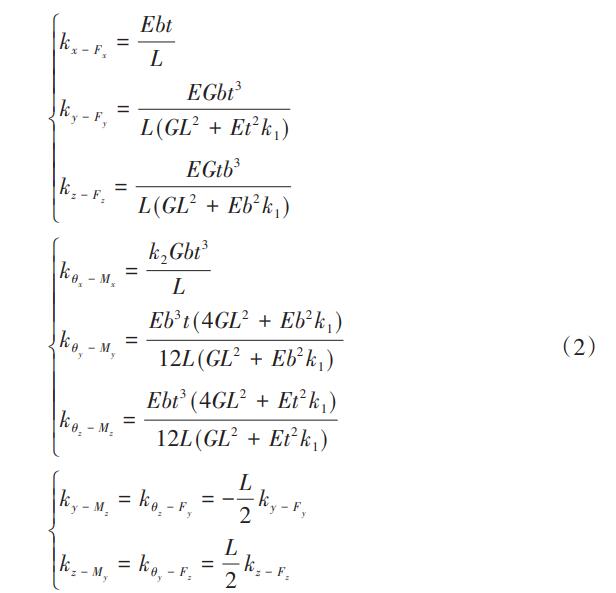
如圖3所示,建立兩個(gè)子柔性單元1、2的局部坐標(biāo)系,使兩個(gè)局部坐標(biāo)系的原點(diǎn)分別與其對(duì)應(yīng)單元橫截面的形心重合。
在該半輪型柔性鉸鏈中,子柔性單元1、2形成并聯(lián)結(jié)構(gòu)。在同一坐標(biāo)系中,其末端剛度為各并聯(lián)單元的剛度之和。為計(jì)算半輪型柔性鉸鏈對(duì)雙側(cè)驅(qū)動(dòng)系統(tǒng)在各方向的支撐剛度,各單元的剛度矩陣應(yīng)整合至坐標(biāo)系{O3,X3,Y3,Z3}中。
本文設(shè)置各子柔性單元的尺寸參數(shù)如表1所示,其中已知參數(shù)由具體功能、材料(兩側(cè)的均勻直梁型子柔性單元結(jié)構(gòu)均采用彈簧鋼60Si2Mn)所確定,未知參數(shù)為本文所研究的影響鉸鏈性能的相關(guān)參數(shù)。

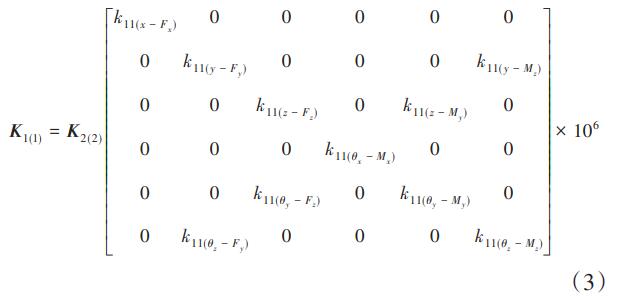
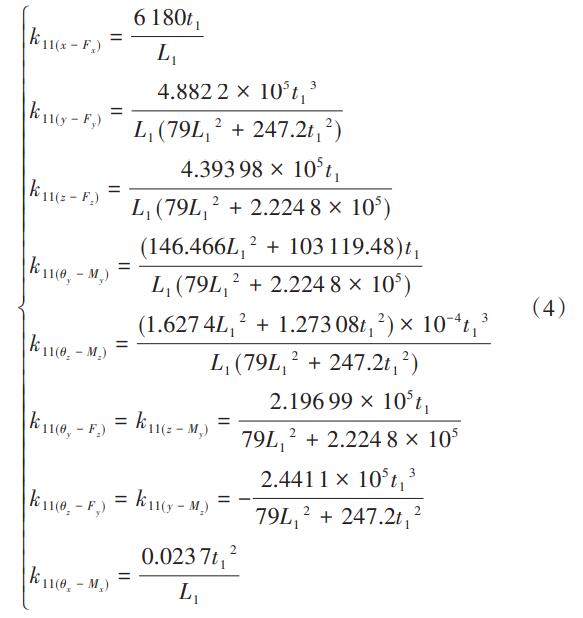
將上述數(shù)值和參數(shù)代入剛度矩陣(1)、(2),并計(jì)算可得到各子柔性單元(1、2)關(guān)于其各自局部坐標(biāo)系的剛度矩陣K1(1)、K2(2)分別為:
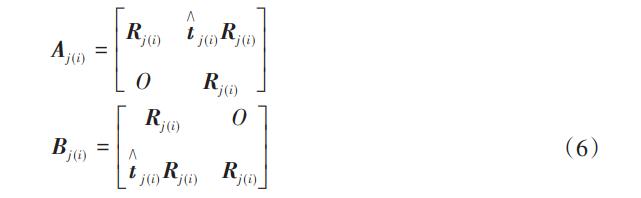
根據(jù)余靖軍提出的理論,剛度矩陣和柔度矩陣的旋量坐標(biāo)變換式為:

式中:A、B為旋量伴隨變換矩陣,滿足上述式中A-1=BT;j (i)為坐標(biāo)系{oi}中的剛度矩陣關(guān)于坐標(biāo)系{oj}的表達(dá)。
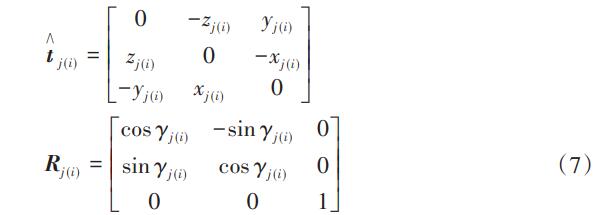
式中:Rj (i)為坐標(biāo)系{oi}關(guān)于{oj}的方向余弦矩陣,其變量為繞Z坐標(biāo)軸的旋轉(zhuǎn)角度γj (i);t j (i)為坐標(biāo)系{oi}關(guān)于{oj}的反對(duì)稱移動(dòng)矩陣,其變量為沿X、Y和Z坐標(biāo)軸的平動(dòng)量,即(xj (i),yj(i),zj(i)):
綜上,半輪型柔性鉸鏈中各子柔性單元?jiǎng)偠染仃囋谀┒俗鴺?biāo)系{O3,X3,Y3,Z3}中的整合總剛度矩陣為:

3 鉸鏈性能分析
柔性鉸鏈?zhǔn)且环N利用自身材料的柔性變形傳遞作用力和形變的機(jī)械連接部件。本文針對(duì)該半輪型柔性鉸鏈的性能分析,選擇鉸鏈的各向剛度、相對(duì)剛度以及轉(zhuǎn)動(dòng)誤差3項(xiàng)指標(biāo)進(jìn)行研究。以未知參數(shù)包括鉸鏈兩側(cè)對(duì)稱設(shè)置的子柔性單元的長(zhǎng)度L1、厚度t1以及其設(shè)置位置與端面法線夾角θ為控制變量,通過數(shù)值仿真可以得到這些參數(shù)(L1,t1,θ)對(duì)半輪型柔性鉸鏈各項(xiàng)性能的影響,為半輪型柔性鉸鏈最優(yōu)結(jié)構(gòu)參數(shù)選取提供指導(dǎo)。
3.1 各向剛度
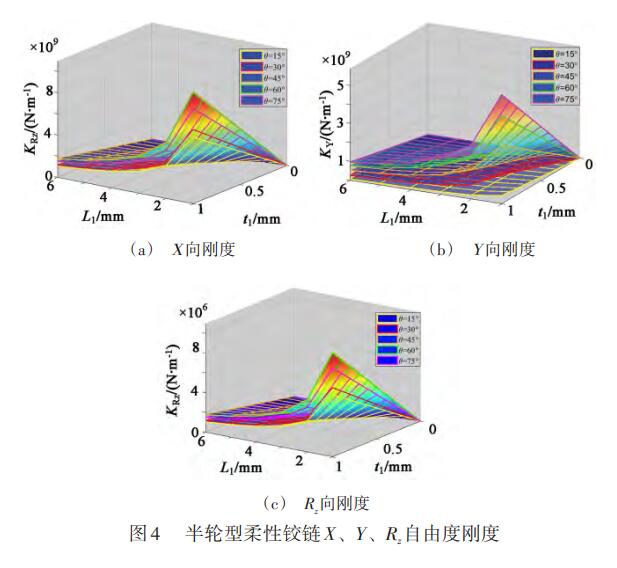
剛度表示柔性鉸鏈在受力時(shí)不同方向上抵抗彈性變形的能力,從數(shù)值上體現(xiàn)柔性鉸鏈彈性變形的難易程度。半輪型柔型鉸鏈變形發(fā)生在繞Z軸轉(zhuǎn)動(dòng)的Rz方向上。然而在對(duì)于雙側(cè)驅(qū)動(dòng)系統(tǒng),柔性鉸鏈通常會(huì)在多個(gè)方向受力導(dǎo)致發(fā)生形變。因此,為了滿足雙側(cè)驅(qū)動(dòng)系統(tǒng)的X、Y方向高剛度要求以及Rz方向的低剛度要求,有必要綜合研究半輪型柔性鉸鏈在X、Y和Rz自由度上的剛度。
控制參數(shù)點(diǎn)坐標(biāo)(L1,t1)與子柔性單元位置角度θ對(duì)半輪型柔性鉸鏈X、Y和Rz自由度的剛度影響如圖4所示。由圖可以看出,在位置角度θ一定的情況下,變量L1越小,即梁的長(zhǎng)度越短,半輪型柔性鉸鏈3個(gè)自由度上的剛度越大;變量t1越大,即梁的厚度越厚,半輪型柔性鉸鏈各自由度的剛度越大。當(dāng)位置角度由15°變化到75°的過程中,半輪型柔性鉸鏈X自由度剛度與Y自由度剛度受梁的厚度及長(zhǎng)度的影響情況呈現(xiàn)對(duì)調(diào)趨勢(shì),且在θ=45°時(shí)其X自由度剛度等于Y自由度剛度。另外,在θ=45°的情況下,梁的厚度及長(zhǎng)度對(duì)半輪型柔性鉸鏈Rz自由度剛度影響最明顯。
3.2 相對(duì)剛度
期望所設(shè)計(jì)柔性鉸鏈在一定方向上產(chǎn)生變形,這一變形方向稱之為工作方向,則其他方向就是非工作方向。由于非工作方向上的剛度并非無窮大,因此柔性鉸鏈在一定載荷下工作時(shí),非工作方向會(huì)產(chǎn)生一定程度的變形位移,稱之為寄生位移。因此,定義相對(duì)剛度為工作方向上剛度與非工作方向上剛度的比值。
對(duì)于半輪型柔性鉸鏈,工作方向?yàn)槔@Z軸轉(zhuǎn)動(dòng)的Rz方向,X、Y方向則為非工作方向。施加的載荷主要為繞Z軸的轉(zhuǎn)矩Mz和xOy平面內(nèi)的力,所以半輪柔性鉸鏈發(fā)生的變形和寄生位移均發(fā)生在xOy平面內(nèi),因此本節(jié)只需考慮xOy平面內(nèi)的相對(duì)剛度。將剛度矩陣(10)中可得半輪型柔性鉸鏈相對(duì)剛度Ratio1、Ratio2為:
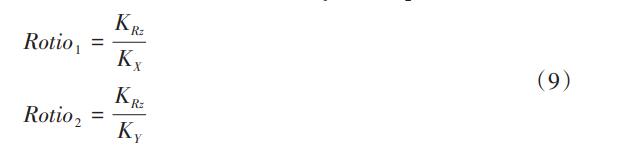
θ對(duì)Ratio1、Ratio2的影響如圖5所示。由圖可以看出,Ratio1的值隨θ的增大而增大且在階段變化顯著;相反地,Ratio2的值隨θ的增大而減小且在變化顯著,但兩條變化曲線是非對(duì)稱的。且在θ=45°的情況下,Ratio1=Ratio2。
3.3 轉(zhuǎn)動(dòng)誤差
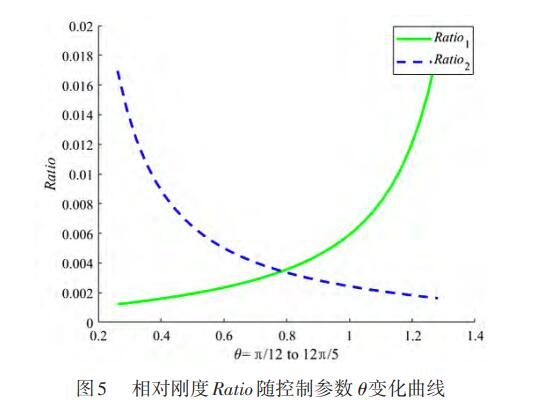
高精度是柔性鉸鏈與傳統(tǒng)剛性鉸鏈相比的一個(gè)顯著優(yōu)點(diǎn)。理想的剛性鉸鏈假設(shè)存在一個(gè)理想的轉(zhuǎn)動(dòng)軸或基點(diǎn),鉸鏈的運(yùn)動(dòng)部分圍繞轉(zhuǎn)動(dòng)軸或基點(diǎn)轉(zhuǎn)動(dòng)。然而在實(shí)際應(yīng)用中剛性鉸鏈存在裝配間隙,實(shí)際的轉(zhuǎn)動(dòng)軸或基點(diǎn)與理想位置存在一定偏差。柔性鉸鏈由于僅由一個(gè)部件加工而成,不存在裝配間隙,但是柔性鉸鏈在一定載荷作用下發(fā)現(xiàn)變形時(shí),其自由端理想情況下會(huì)產(chǎn)生一個(gè)圓弧彎曲,并且這個(gè)圓弧的圓心相對(duì)于鉸鏈應(yīng)該是固定不變的。然而在實(shí)際應(yīng)用中,圓弧的曲率和圓心的位置都會(huì)與理想情況產(chǎn)生一定程度的偏差。
柔性鉸鏈的轉(zhuǎn)動(dòng)誤差定義為變形后的基點(diǎn)位置p'與初始位置之間的距離。轉(zhuǎn)動(dòng)誤差定量描述柔性鉸鏈變形時(shí)虛擬轉(zhuǎn)動(dòng)軸或基點(diǎn)的移動(dòng)情況,轉(zhuǎn)動(dòng)誤差越小,柔性鉸鏈的精度越高。因此,根據(jù)等效柔性鉸鏈模型中初始基點(diǎn)位置,以端面中心為原點(diǎn)建立三維坐標(biāo)系,分析其轉(zhuǎn)動(dòng)誤差,如圖6所示。從而等效分析半輪型柔性鉸鏈的精度。
整體半輪型柔性鉸鏈的長(zhǎng)度為L(zhǎng)h,在力矩MZ的作用下,通過幾何關(guān)系計(jì)算轉(zhuǎn)動(dòng)誤差e可表示為:
提取半輪型柔性鉸鏈總剛度矩陣(8)中對(duì)應(yīng)位置剛度,并代入式(10),得到控制參數(shù)點(diǎn)坐標(biāo)(L1,t1)與子柔性單元位置狀態(tài)量角度θ對(duì)半輪型柔性鉸鏈轉(zhuǎn)動(dòng)誤差影響如圖7所示。從圖中可以看出,在位置角度θ一定的情況下,變量L1越大,即梁的長(zhǎng)度越長(zhǎng),半輪型柔性鉸鏈轉(zhuǎn)動(dòng)誤差e越大;變量t1越小,即梁的厚度越薄,半輪型柔性鉸鏈轉(zhuǎn)動(dòng)誤差e越大。軸轉(zhuǎn)動(dòng)誤差e隨θ的增大而減小,并且在15°~30°變化明顯,在45°~75°變化將不再明顯。

通過上述分析,為了滿足半輪型柔性鉸鏈X方向和Y方向高剛度需求需選取合適的L1和t1,但兩相對(duì)剛度呈現(xiàn)對(duì)調(diào)趨勢(shì),即實(shí)現(xiàn)一個(gè)方向的高剛度而另一方向卻呈現(xiàn)低剛度。同樣地,兩相對(duì)剛度Ratio1、Ratio2隨θ的增大也呈現(xiàn)相反變化趨勢(shì)。所以針對(duì)位置角度θ的選取,選取θ=45°,即兩側(cè)子柔性單元與整個(gè)鉸鏈端面法線間夾角為45°。此時(shí),半輪型柔性鉸鏈的X自由度剛度和Y自由度剛度變化趨勢(shì)相同,可方便通過選取合適的L1和t1實(shí)現(xiàn)兩方向高剛度的要求,且轉(zhuǎn)動(dòng)誤差也相對(duì)很小。
4 結(jié)束語
本文針對(duì)雙側(cè)驅(qū)動(dòng)系統(tǒng)的整體高剛度和局部相對(duì)低剛度特性,研究了一種半輪型柔性鉸鏈結(jié)構(gòu)的設(shè)計(jì)方法。基于旋量變換理論,以半輪型柔性鉸鏈中子柔性單元的長(zhǎng)度L1、厚度t1以及位置角度θ作為參數(shù),建立半輪型柔性鉸鏈的剛度矩陣模型。提取剛度矩陣中X、Y、Rz自由度剛度對(duì)應(yīng)的元素,通過分析半輪型柔性鉸鏈的各向剛度和相對(duì)剛度,表明在設(shè)計(jì)計(jì)算時(shí)應(yīng)優(yōu)先考慮θ,這樣鉸鏈的剛度性能分析就轉(zhuǎn)換為選取合適的L1和t1實(shí)現(xiàn)兩方向高剛度的要求,為柔性鉸鏈的結(jié)構(gòu)設(shè)計(jì)提供理論依據(jù)。
第一作者簡(jiǎn)介:胡金鑫 (1996-),男,碩士,研究實(shí)習(xí)員,研 究領(lǐng)域?yàn)闄C(jī)器人動(dòng)力學(xué)與運(yùn)動(dòng)控制,已發(fā)表論文2篇。
通訊作者簡(jiǎn)介:韓哈斯敖其爾 (1986-),男,博士,副研究 員,研究領(lǐng)域?yàn)榭臻g機(jī)構(gòu)設(shè)計(jì)、并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析。
- 相關(guān)閱讀
- 非標(biāo)自動(dòng)化鉸鏈組裝生產(chǎn)設(shè)計(jì)和研究2021年11月9日
- 使用BoPET鉸鏈的微加工水浸式掃描鏡2021年9月30日
- 鉸鏈在膝關(guān)節(jié)假體中的應(yīng)用研究探討2021年5月4日
- 某地面雷達(dá)水鉸鏈漏液故障分析及改進(jìn)2021年7月7日
- 乘用車車門鉸鏈正向布置技術(shù)研究2021年7月7日
- 開放松解術(shù)聯(lián)合橈骨遠(yuǎn)端固定鉸鏈?zhǔn)酵夤潭ㄖЪ苤委熤怅P(guān)節(jié)僵硬2021年3月9日